

























La domanda che da anni ci si pone quando si parla di automazione con i cobot è se questa possa considerarsi davvero “collaborativa” oppure no. Chi approfondisce, a esempio, il rapporto uomo-macchina, oppure si occupa di standard e certificazioni spesso si pone il quesito.
Il rapporto uomo-macchina
Spesso nell’indagare la collaboratività si osserva il rapporto tra uomo e macchina e si soppesano i fattori di sicurezza e rischio. È il caso in cui, a esempio, si ragiona rispetto a cosa accade se una macchina si muove con eccessiva velocità accanto a un operatore, oppure se questi viene urtato inavvertitamente o, caso emblematico, se una macchina pur muovendosi a velocità adeguate alle operazioni che svolge e al carico che movimenta, stia montando un organo di presa o un utensile. In quel caso un urto accidentale può trasformarsi in un serio incidente.
Gli standard e le certificazioni
Un’altra modalità per indagare la collaborazione, e validarne gli scenari, è quella percorsa dagli esperti di standard e di certificazioni. I professionisti che operano in questo ambito e gli esiti che questi riportano provano a individuare percorsi e scenari che definiscano quando la situazione produttiva possa definirsi collaborativa.
Approfondire questi temi, tuttavia, non porta alla risposta alla domanda iniziale.
E se, per il designer industriale, fosse proprio la domanda a essere “sbagliata”?
L’esigenza del progettista, infatti, è sfruttare al meglio la tecnologia esistente per rispondere ai requisiti dell’applicazione che è chiamato a creare. La domanda “giusta” potrebbe e dovrebbe quindi essere: un cobot può essere sfruttato al meglio in diversi modi o solo come “tool collaborativo”?
Inserendo il discrimine rispetto a “quando” concretamente serve la collaborazione nell’automazione e nelle fasi produttive, il progettista industriale può cogliere la strada da seguire (e la risposta al quesito).
In alcune fasi, infatti, i cobot possono e devono essere collaborativi. Immaginiamo una fase di assemblaggio in cui robot e uomo operano nella medesima area di lavoro, oppure una fase in cui la guida manuale è necessaria per svolgere alcune operazioni.
Ma quando non è più necessario? Quando il robot deve svolgere compiti – asservimenti, saldature, packaging tra gli altri – in cui il ruolo dell’operatore è marginale o, per meglio dire, esula dal fare e passa alla fase di controllo e gestione?
In quel caso non è più strettamente necessario che la tecnologia sia collaborativa. Sarebbe quindi sufficiente “spostare fisicamente” il robot da un punto all’altro della linea e consentirgli di compiere le diverse operazioni che deve svolgere al fine di ottimizzare l’automazione e agire con i “gradi di collaboratività” effettivamente richiesti dall’applicazione in ogni sua specifica fase.
Fantasia? No, concreta realtà. È il caso del Cobot Transfer Unit (CTU) di Rollon.

Tutti i vantaggi della movimentazione lineare dei cobot
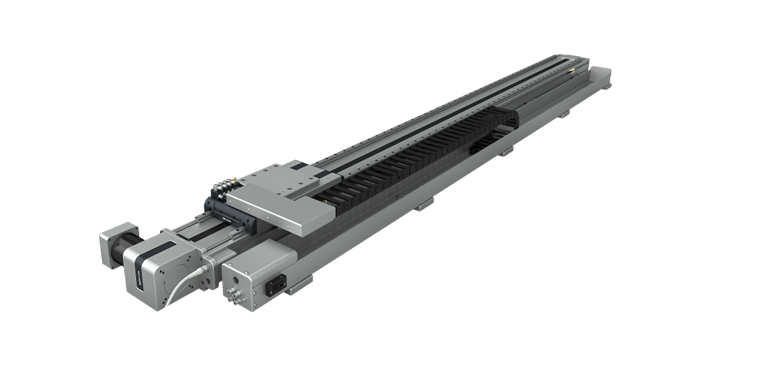
Il Cobot Transfer Unit di Rollon è una soluzione completa, pronta per l’installazione, sviluppata per incrementare il raggio d’azione dei cobot – a partire da quelli di Universal Robots – nei processi automatizzati di molteplici settori. Un settimo asse “speciale” pensato per la movimentazione degli antropomorfi collaborativi.
Nel dettaglio il CTU consente:
- INCREMENTO DEL RAGGIO D’AZIONE: con una corsa massima anche oltre i 5.500 mm standard a catalogo il raggio di azione del cobot si estende in maniera davvero significativa.
- OPERATIVITA’ PLUG AND PLAY attraverso il software Rollon, il CTU garantisce rapidità nella fase di programmazione grazie a un’interfaccia intuitiva, mentre la presenza di una specifica funzione di debug permette di risolvere eventuali errori nel processo di programmazione. Il software Rollon consente la gestione fino a sei assi addizionali, ampliando le possibilità di applicazione su molteplici aree di lavoro.
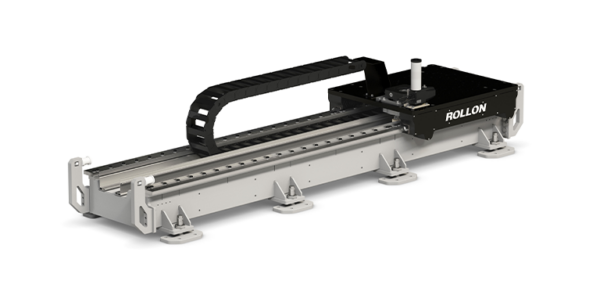
- RAPIDITA’ DI INSTALLAZIONE: il CTU monta una piastra di collegamento dedicata ai cobot che permette un’installazione rapida del braccio robotico a bordo dell’asse.
- ASSEMBLAGGIO ORIZZONTALE VERTICALE E A PAVIMENTO: un’opportunità perfetta per movimentare materiali, assemblaggio, distribuzione, ispezione qualità e finitura.
Quadro elettrico compatto, motore, azionamento, riduttore e cavi sono inclusi nella fornitura. Il CTU è inoltre completato da molteplici funzionalità di sicurezza come l’arresto d’emergenza simultaneo, manuale (azionando lo stop sul teach pendant) e automatico, attivato dai sistemi di sicurezza del cobot che intervengono a bloccare anche l’asse. L’asse è inoltre predisposto per accogliere sensori di sicurezza esterni come scanner laser e ottici o radar.
Il CTU, infine, può integrare ulteriori freni meccanici azionati pneumaticamente, per bloccare il carro sulla guida mentre i parametri di velocità e accelerazione (V=1,5 m/s A=3m/s2) sono ottimizzati per il funzionamento con i cobot UR per facilitare un uso pienamente collaborativo.
La vera (e possibile) collaborazione è quando questa davvero serve
Il CTU è dunque sia una soluzione al top di gamma tra di prodotti di movimentazione lineare sia uno strumento di automazione industriale che abbina la collaboratività dei robot al movimento anche su lunghe corse.
Le opportunità del CTU tengono così assieme la massima espressione tanto del robot (collaborativo) quanto delle esigenze di movimentazione lineare, operando con le peculiarità della collaborazione (gestita in maniera integrata tra asse lineare e robot tramite specifico software e interfacce) quando questa è necessaria e come un vero robot antropomorfo industriale in altre fasi messe tra loro in relazione, e fortemente ottimizzate, proprio dal viaggio sull’asse ausiliario esterno.
Occorre essere “pienamente collaborativi”? Il cobot può svolgere quella funzione. Occorre massima velocità e prestazioni al top? Il cobot si sposta nel punto dove svolgere la nuova operazione.