










Products
Select the product line

Linear guides
Since they are available in a variety of sizes and capacity levels, they are used in many different applications. At Rollon, we provide linear guide rails, with hardened raceways, high load capacities and self-alignment features. Our linear guide rail systems are also capable of working in dirty environments. Therefore, no matter what your need for linear motion rails, you have come to the right place.
For more information on linear guide systems, and the types of linear guides we offer, check out below.

Telescopic Rails
Our selection of telescopic slide rails is guaranteed to support your linear load.
Telescopic slides are linear guides with precision ball or rollers. These load extractors are complete with hardened raceways, high load capacities, and low bending. Rollon telescoping linear rails are also resistant to shocks and vibrations, ideal for even the toughest loads.
If you are looking for partial, total, or extended extraction up to 200% of the length of the guide, check out the selection below.

Curved Guides and Rails
Curved guideways equipped with ball or roller bearings, engineered to provide a solution for application requiring precision and efficiency in non-linear movements. Exceptional durability, thanks to hardened raceways which resist wear and reduce the need for maintenance, ensuring a long product life.
The curved guides are available in configurations with either constant or variable radii, designed to handle heavy loads, they are the ideal solution in a variety of applications where handling heavy loads is a key point.
Reliable even in the most demanding environments, maintaining flawless operation even with dirt and debris.

Linear Actuators
Available with belt, ball screw or rack and pinion drives for different precision and speed requirements. Guides with bearings or ball recirculating systems for different load capacities and critical environments.

Multi-Axis Systems
Available with different configurations and driving systems. Multi-axis systems find applications in a wide range of industries, from advanced robotics to machinery servo systems, from high-precision assembly systems to packaging lines and high-speed production lines.
Thanks to their design, XYZ combined linear units provide outstanding performance in terms of speed, precision and reliability. They are particularly suitable for applications requiring smooth and precise multi-axis movements, offering flexibility in system configuration.
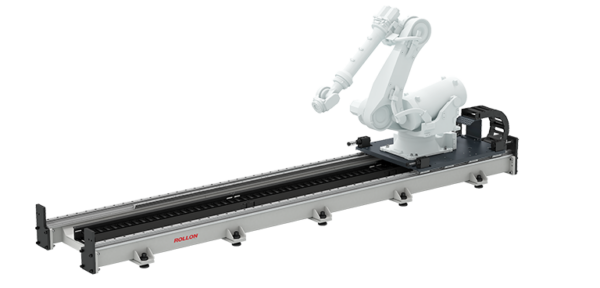
Robot Transfer Units
Full spectrum of steel and aluminum robot transfer units solutions, accommodating all sizes of robotic arms.
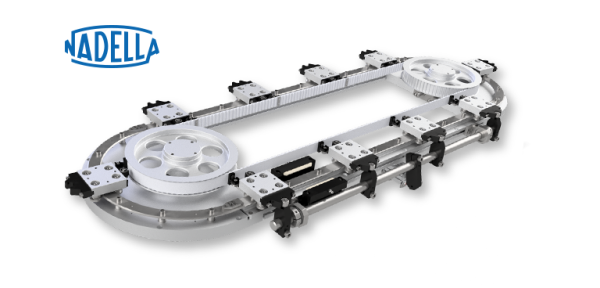
Circular Systems
Circular systems are a ready to use solution composed of the following elements: aluminum basement, guide rails and carriages, transmission by gearbox and toothed belt, lubrication units and carriage indexing for precise carriage location. Precision circular motion systems reduce working areas compared to traditional lines, increase efficiency, reliability, and are available in oval or ring configurations and with a variety of options.
AXNR Circular System

XP Xtrem Position
The XP Xtrem Position family of high-performance ball screws is specifically engineered for production technologies, with a particular emphasis on linear drives in Machine Tool applications. This family of ball screws prioritizes optimized outcomes in terms of rigidity, dynamics, and positioning accuracy.

XL Xtrem Load
The XL Xtrem Load family of high load ball screws are specifically engineered for heavy duty applications with special focus on high load actuators in injection molding, energy, elevation systems and presses among others. This family of ball screws places a strong emphasis on the custom designs for optimized results in high load capacity, dynamics and efficiency.
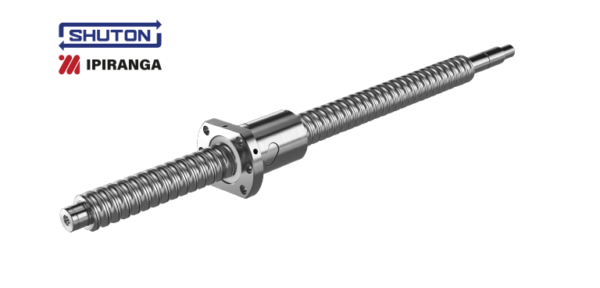
XT Xtrem Transport Ball Screws
The XT Xtrem Transport family of high efficiency ball screws are specifically engineered for automation applications and are available in precision and rolled options. This family of ball screws places a strong emphasis on integrability, interchangeability, and the quick supply of ball screws.

Rollon RB
Rollon RB recirculating ball screws are the go-to solution for those who need components capable of handling high volumes with maximum interchangeability, fast delivery times, and the possibility of a customized design. Designed to operate in different fields such as automation, industrial machinery, healthcare, packaging, material handling, electronics, food & beverage, and energy.
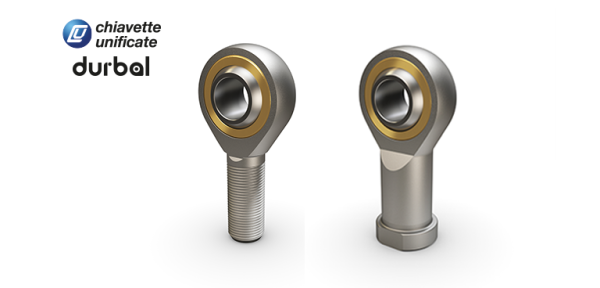
Rod ends
Our rod end bearings are tailored for demanding industrial requirements. Engineered for high stress, speed and heavy loads, the product range includes maintenance-free, heavy-duty ball or roller-bearing rod ends and high-precision options ideal even for high-temperature and demanding environments.
According to ISO 12240 specifications, the solutions in Rollon portfolio include the top of German and Italian engineering, offering the global market the very best of “Made in Germany” and “Made in Italy.

Spherical plain bearings
Spherical plain bearings tailored for demanding industrial requirements. Engineered for high stress, speed and heavy loads, the product range include maintenance-free, heavy-duty recirculating ball or roller spherical plain bearings and high-precision options ideal even for high-temperature and demanding environments.
According to ISO 12240 specifications, the solutions in Rollon portfolio include the top of German and Italian engineering, offering the global market the very best of “Made in Germany” and “Made in Italy.

Needle Bearings
Needle bearings are a standard element of a rotational motion system. Needle bearings are used in applications where high load capacity, high precision and small overall dimensions are required. Nadella offers a big range of needle bearings. The strength of Nadella’s production consists also in the ability of producing special items at a reasonable price. Every bearing contains the long experience acquired from Nadella through decades of design, production and application.

The industries we serve
Our extensive industry-focused knowledge for a wide range of sectors.
Why choose
Rollon?

Engineering and sizing

Wide range of solutions

Product customization

Local support

Vertical integrated manufacturing